ShadowPatch: Shadow Based Segmentation for Reliable Depth Discontinuities in Photometric Stereo
Abstract
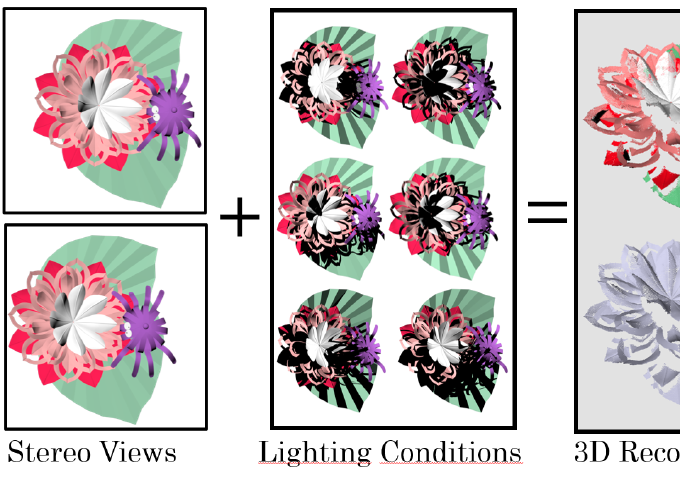
Photometric stereo is a well-established method with exceptional features to recover surface details and material properties, like surface albedo or even specularity. However, while the surface is locally well-defined, computing absolute depth by integrating surface normals is notoriously difficult. Integration errors can be introduced and propagated by numerical inaccuracies from inter-reflection of light or non-Lambertian surfaces. But especially ignoring depth discontinuities for overlapping or disconnected objects, will introduce strong distortion artefacts. During the acquisition process for photometric stereo, the object is lit from different positions and self-shadowing is in general considered as an unavoidable drawback, complicating the numerical estimation of normals. However, we observe that shadow boundaries correlate strongly with depth discontinuities and exploit the visual structure introduced by self-shadowing to create a semantically plausible image segmentation consisting of continuous surfaces. In order to make depth estimation more robust, we deeply integrate photometric stereo with depth-from-stereo. Having obtained a semantic segmentation of continuous surfaces, allows us to reduce the computational cost for correspondence search in depth-from-stereo. To speed-up computation further, we merge segments into larger meta-segments during an iterative depth refinement optimization. The reconstruction error of our method is equal or smaller than previous work, and reconstruction results are characterized by robust handling of depth-discontinuities, without any smearing artifacts.